
三明激光雷达 测试



更新时间:2024-11-10 07:00:00
价格:¥30000/个
公司名:深圳市中为检验技术有限公司
类别:激光雷达检测
测试:激光雷达点云质量评价、分辨率、测程、误差等
联系电话:19925421159
联系手机: 19925421159
联系人:黄工
让卖家联系我
详细介绍
自动驾驶中采用激光雷达做感知可以分为两个层次,低层次感知也叫作障碍物检测,只需要探测到前方有障碍物即可;高层次感知可以看做目标识别,需要对障碍物信息进一步分类。
激光雷达有哪些优势:
1、激光雷达可以准确估计障碍物的位置。到目前为止,我们还没有更准确的方法来做到这一点。
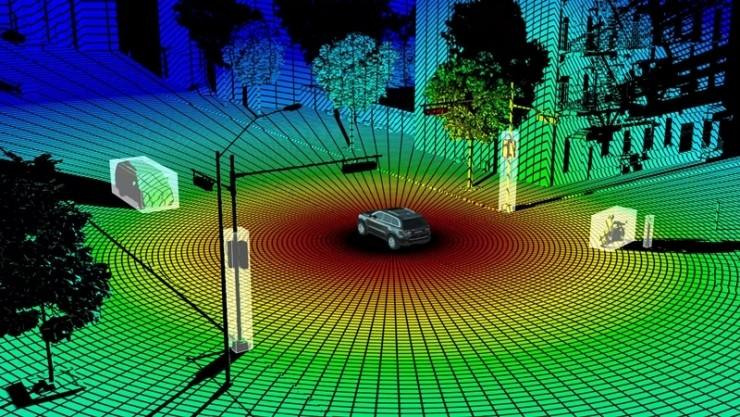
2、如果我们看到车辆前面的激光雷达生成的点云,即使障碍物检测系统没有检测到任何东西,我们也可以停下来。

激光雷达的优点:
1、分辨率高
激光雷达可以获得高的角度、距离和速度分辨率。通常角分辨率不低于0.1mard也是说可以分辨3km距离上相距0.3m的两个目标(这是微波雷达无论如何也办不到的),并可同时跟踪多个目标;距离分辨率可达0.lm;速度分辨率能达到10m/s以内。距离和速度分辨率高,意味着可以利用距离——多谱勒成像技术来获得目标的清晰图像。分辨率高,是激光雷达的显著的优点,其多数应用都是基于此。
2、隐蔽性好、抗有源干扰能力强
激光直线传播、方向性好、光束非常窄,只有在其传播路径上才能接收到,因此敌方截获非常困难,且激光雷达的发射系统(发射望远镜)口径很小,可接收区域窄,有意发射的激光干扰信号进入接收机的概率低;另外,与微波雷达易受自然界广泛存在的电磁波影响的情况不同,自然界中能对激光雷达起干扰作用的信号源不多,因此激光雷达抗有源干扰的能力很强,适于工作在日益复杂和激烈的信息战环境中。
3、低空探测性能好
微波雷达由于存在各种地物回波的影响,低空存在有一定区域的盲区(无法探测的区域)。而对于激光雷达来说,只有被照射的目标才会产生反射,完全不存在地物回波的影响,因此可以“零高度”工作,低空探测性能较微波雷达强了许多。
4、体积小、质量轻
通常普通微波雷达的体积庞大,整套系统质量数以吨记,光天线口径达几米甚至几十米。而激光雷达要轻便、灵巧得多,发射望远镜的口径一般只有厘米级,整套系统的质量小的只有几十公斤,架设、拆收都很简便。而且激光雷达的结构相对简单,维修方便,操纵容易,价格也较低。
激光雷达的障碍物检测流程一般如下:
1、 考虑到车上有多个传感器共同作业,需要对输入的激光点云做时间同步和外参标定。
2、考虑到激光雷达的采样噪声和点云数据量大的问题,需要对点云做预处理,减少数据量,剔除噪声点。
3、每帧点云数据中包含了大量的地面点,检测的目的是获取道路障碍物信息,需要进一步分割出地面上的点云。
4、地面上的障碍物点通常采用无监督的聚类算法形成多个团簇,每个团簇则表示一个障碍物。
5、针对团簇的物体识别可以根据任务需求而定,如果需要类别信息,可以采用特征提取+分类器的方式分类障碍物。
6、对每一块团簇做包围框拟合,计算障碍物属性,比如中心点,质心点,长宽高等。
7、对每一个障碍物构建一个滤波器做跟踪,平滑输出。

汽车使用的雷达主要有三种:
1、超声波雷达:这是一种很常见的传感器,主要用于短距离障碍物探测,比如倒车雷达,平时倒车时发出的滴滴声,是超声波雷达给出的反馈。它的优点是成本低,测距方法简单,适合短距离测量。
2、毫米波雷达:工作原理和超声波雷达类似,但它更进了一步,多用于测距离、速度和方位。优点是分辨率高,反应速度敏捷,不受天气影响,能够穿透雾、烟、灰尘等,测量距离更远,一般在150-250米之间。
3、激光雷达:优点是探测范围广,获取距离和位置的精度更高,能生成三维的位置信息,快速确定目标的位置、大小、外貌和材质,在远、小障碍物、近距离加塞等场景有优势。
我们公司秉承“顾客至上、服务为本”的经营宗旨,以“以诚合作,以信经营”的经营理念服务广大顾客。
激光雷达有哪些优势:
1、激光雷达可以准确估计障碍物的位置。到目前为止,我们还没有更准确的方法来做到这一点。
2、如果我们看到车辆前面的激光雷达生成的点云,即使障碍物检测系统没有检测到任何东西,我们也可以停下来。

激光雷达的优点:
1、分辨率高
激光雷达可以获得高的角度、距离和速度分辨率。通常角分辨率不低于0.1mard也是说可以分辨3km距离上相距0.3m的两个目标(这是微波雷达无论如何也办不到的),并可同时跟踪多个目标;距离分辨率可达0.lm;速度分辨率能达到10m/s以内。距离和速度分辨率高,意味着可以利用距离——多谱勒成像技术来获得目标的清晰图像。分辨率高,是激光雷达的显著的优点,其多数应用都是基于此。
2、隐蔽性好、抗有源干扰能力强
激光直线传播、方向性好、光束非常窄,只有在其传播路径上才能接收到,因此敌方截获非常困难,且激光雷达的发射系统(发射望远镜)口径很小,可接收区域窄,有意发射的激光干扰信号进入接收机的概率低;另外,与微波雷达易受自然界广泛存在的电磁波影响的情况不同,自然界中能对激光雷达起干扰作用的信号源不多,因此激光雷达抗有源干扰的能力很强,适于工作在日益复杂和激烈的信息战环境中。
3、低空探测性能好
微波雷达由于存在各种地物回波的影响,低空存在有一定区域的盲区(无法探测的区域)。而对于激光雷达来说,只有被照射的目标才会产生反射,完全不存在地物回波的影响,因此可以“零高度”工作,低空探测性能较微波雷达强了许多。
4、体积小、质量轻
通常普通微波雷达的体积庞大,整套系统质量数以吨记,光天线口径达几米甚至几十米。而激光雷达要轻便、灵巧得多,发射望远镜的口径一般只有厘米级,整套系统的质量小的只有几十公斤,架设、拆收都很简便。而且激光雷达的结构相对简单,维修方便,操纵容易,价格也较低。

激光雷达的障碍物检测流程一般如下:
1、 考虑到车上有多个传感器共同作业,需要对输入的激光点云做时间同步和外参标定。
2、考虑到激光雷达的采样噪声和点云数据量大的问题,需要对点云做预处理,减少数据量,剔除噪声点。
3、每帧点云数据中包含了大量的地面点,检测的目的是获取道路障碍物信息,需要进一步分割出地面上的点云。
4、地面上的障碍物点通常采用无监督的聚类算法形成多个团簇,每个团簇则表示一个障碍物。
5、针对团簇的物体识别可以根据任务需求而定,如果需要类别信息,可以采用特征提取+分类器的方式分类障碍物。
6、对每一块团簇做包围框拟合,计算障碍物属性,比如中心点,质心点,长宽高等。
7、对每一个障碍物构建一个滤波器做跟踪,平滑输出。

汽车使用的雷达主要有三种:
1、超声波雷达:这是一种很常见的传感器,主要用于短距离障碍物探测,比如倒车雷达,平时倒车时发出的滴滴声,是超声波雷达给出的反馈。它的优点是成本低,测距方法简单,适合短距离测量。
2、毫米波雷达:工作原理和超声波雷达类似,但它更进了一步,多用于测距离、速度和方位。优点是分辨率高,反应速度敏捷,不受天气影响,能够穿透雾、烟、灰尘等,测量距离更远,一般在150-250米之间。
3、激光雷达:优点是探测范围广,获取距离和位置的精度更高,能生成三维的位置信息,快速确定目标的位置、大小、外貌和材质,在远、小障碍物、近距离加塞等场景有优势。
我们公司秉承“顾客至上、服务为本”的经营宗旨,以“以诚合作,以信经营”的经营理念服务广大顾客。

