
1550激光雷达




更新时间:2024-11-10 07:00:00
价格:¥30000/个
公司名:深圳市中为检验技术有限公司
品牌:中为CTNT
认证类型:强制认证
联系电话:19925421159
联系手机: 19925421159
联系人:黄工
让卖家联系我
详细介绍
激光雷达(英文:Laser Radar),是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数。它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
激光雷达有哪些优势:
1、激光雷达可以准确估计障碍物的位置。到目前为止,我们还没有更准确的方法来做到这一点。
2、如果我们看到车辆前面的激光雷达生成的点云,即使障碍物检测系统没有检测到任何东西,我们也可以停下来。
激光雷达的障碍物检测流程一般如下:
1、 考虑到车上有多个传感器共同作业,需要对输入的激光点云做时间同步和外参标定。
2、考虑到激光雷达的采样噪声和点云数据量大的问题,需要对点云做预处理,减少数据量,剔除噪声点。
3、每帧点云数据中包含了大量的地面点,检测的目的是获取道路障碍物信息,需要进一步分割出地面上的点云。
4、地面上的障碍物点通常采用无监督的聚类算法形成多个团簇,每个团簇则表示一个障碍物。
5、针对团簇的物体识别可以根据任务需求而定,如果需要类别信息,可以采用特征提取+分类器的方式分类障碍物。
6、对每一块团簇做包围框拟合,计算障碍物属性,比如中心点,质心点,长宽高等。
7、对每一个障碍物构建一个滤波器做跟踪,平滑输出。
现代激光技术、探测技术和计算机技术确保激光雷达实现自动连续观测,获取大气性质实时变化。
通过探测激光与大气中各种分子和大气气溶胶等介质相互作用的辐射信号来反演大气性质,其测量原理涉及激光辐射与大气介质间相互作所产生的各种物理过程。按照不同原理区分,有差分吸收雷达、米散射雷达、拉曼雷达等等,激光雷达测量大气参数包括:气溶胶和云(能见度,不同波长散射和消光特性,偏振特性,整层光学厚度和大气透过率等),温度、密度(气压)、湿度(水汽含量),痕量气体含量( SO2、 O3、CO2 、NOx、CH4), 风场等。随着激光雷达技术的不断发展,它已经广泛应用于大气、环境、气象、空间、遥感等众多领域。

汽车使用的雷达主要有三种:
1、超声波雷达:这是一种很常见的传感器,主要用于短距离障碍物探测,比如倒车雷达,平时倒车时发出的滴滴声,是超声波雷达给出的反馈。它的优点是成本低,测距方法简单,适合短距离测量。
2、毫米波雷达:工作原理和超声波雷达类似,但它更进了一步,多用于测距离、速度和方位。优点是分辨率高,反应速度敏捷,不受天气影响,能够穿透雾、烟、灰尘等,测量距离更远,一般在150-250米之间。
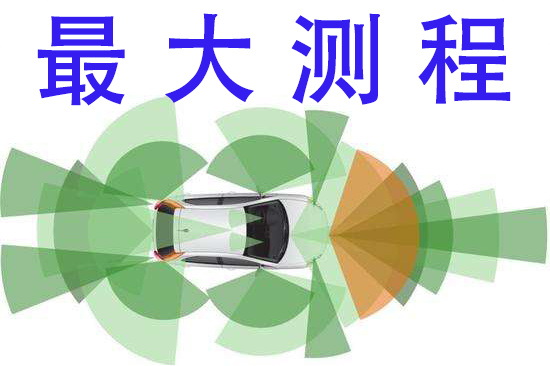
3、激光雷达:优点是探测范围广,获取距离和位置的精度更高,能生成三维的位置信息,快速确定目标的位置、大小、外貌和材质,在远、小障碍物、近距离加塞等场景有优势。
我们公司以质量求生存、以信誉求发展、以服务求效益,质量为本、用户至上的企业精神,更好地服务广大客户。
激光雷达有哪些优势:
1、激光雷达可以准确估计障碍物的位置。到目前为止,我们还没有更准确的方法来做到这一点。
2、如果我们看到车辆前面的激光雷达生成的点云,即使障碍物检测系统没有检测到任何东西,我们也可以停下来。

激光雷达的障碍物检测流程一般如下:
1、 考虑到车上有多个传感器共同作业,需要对输入的激光点云做时间同步和外参标定。
2、考虑到激光雷达的采样噪声和点云数据量大的问题,需要对点云做预处理,减少数据量,剔除噪声点。
3、每帧点云数据中包含了大量的地面点,检测的目的是获取道路障碍物信息,需要进一步分割出地面上的点云。
4、地面上的障碍物点通常采用无监督的聚类算法形成多个团簇,每个团簇则表示一个障碍物。
5、针对团簇的物体识别可以根据任务需求而定,如果需要类别信息,可以采用特征提取+分类器的方式分类障碍物。
6、对每一块团簇做包围框拟合,计算障碍物属性,比如中心点,质心点,长宽高等。
7、对每一个障碍物构建一个滤波器做跟踪,平滑输出。

现代激光技术、探测技术和计算机技术确保激光雷达实现自动连续观测,获取大气性质实时变化。
通过探测激光与大气中各种分子和大气气溶胶等介质相互作用的辐射信号来反演大气性质,其测量原理涉及激光辐射与大气介质间相互作所产生的各种物理过程。按照不同原理区分,有差分吸收雷达、米散射雷达、拉曼雷达等等,激光雷达测量大气参数包括:气溶胶和云(能见度,不同波长散射和消光特性,偏振特性,整层光学厚度和大气透过率等),温度、密度(气压)、湿度(水汽含量),痕量气体含量( SO2、 O3、CO2 、NOx、CH4), 风场等。随着激光雷达技术的不断发展,它已经广泛应用于大气、环境、气象、空间、遥感等众多领域。

汽车使用的雷达主要有三种:
1、超声波雷达:这是一种很常见的传感器,主要用于短距离障碍物探测,比如倒车雷达,平时倒车时发出的滴滴声,是超声波雷达给出的反馈。它的优点是成本低,测距方法简单,适合短距离测量。
2、毫米波雷达:工作原理和超声波雷达类似,但它更进了一步,多用于测距离、速度和方位。优点是分辨率高,反应速度敏捷,不受天气影响,能够穿透雾、烟、灰尘等,测量距离更远,一般在150-250米之间。
3、激光雷达:优点是探测范围广,获取距离和位置的精度更高,能生成三维的位置信息,快速确定目标的位置、大小、外貌和材质,在远、小障碍物、近距离加塞等场景有优势。
我们公司以质量求生存、以信誉求发展、以服务求效益,质量为本、用户至上的企业精神,更好地服务广大客户。

